服務熱線
0755-83044319

發布時間:2022-03-26作者來源:印寧華瀏覽:5179
室內定位技術具有廣闊的應用前景,可與寬帶移動互聯網、云計算、大數據、高性能計算等技術相結合,形成新型綜合應用,在提升國家空間基礎設施的服務能力和服務水平,提升城市在重大災害、公共安全和應急救援領域的服務能力,助力醫療健康和養老等社會服務網絡化、定制化的進程,促進技術創新和商業模式創新融合發展。
目前室內定位常用的定位方法,從原理上主要分為七種:鄰近探測法、質心定位法、多邊定位法、三角定位法、極點法、指紋定位法和航位推算法。
人的定位:敏感區域的訪客,養老院的老人,醫院恢復的病人,工地的工人,巡更人員。
物的定位:金融抵押車輛,購物手推車,倉儲托盤,文物展品,出產設備等。
上面這些運用的共性,就是需求集中在一個限制區域內找到方針,因此叫做室內定位。常用的室內定位技能主要有RFID,紅外線,超聲波,2.4GHz的ZigBee、WiFi、藍牙(RSSI, AOA/AOD, HADM, WIRA),UWB等。這些技能各有好壞,例如RFID有方向性,UWB超寬帶限制覆蓋范圍,2.4GHz多徑攪擾嚴重等,不能一招走遍全國。其中,蘋果公司在2013年發布了iBeacon技能,期望運用藍牙布置的便利性來完成室內定位和精準營銷。
根據上面介紹的定位原理和觀測量,衍生出了多種室內定位技術,下面將對主流的室內定位技術進行簡要介紹。
1.WiFi定位技術
目前WiFi是相對成熟且應用較多的技術,這幾年有不少公司投入到了這個領域。WiFi室內定位技術主要有兩種。
WiFi定位一般采用“近鄰法”判斷,即最靠近哪個熱點或基站,即認為處在什么位置,如附近有多個信源,則可以通過交叉定位(三角定位),提高定位精度。
由于WiFi已普及,因此不需要再鋪設專門的設備用于定位。用戶在使用智能手機時開啟過Wi-Fi、移動蜂窩網絡,就可能成為數據源。該技術具有便于擴展、可自動更新數據、成本低的優勢,因此最先實現了規模化。
不過,WiFi熱點受到周圍環境的影響會比較大,精度較低。為了做得準一點有公司就做了WiFi指紋采集,事先記錄巨量的確定位置點的信號強度,通過用新加入的設備的信號強度對比擁有巨量數據的數據庫,來確定位置。由于采集工作需要大量的人員來進行,并且要定期進行維護,技術難以擴展,很少有公司能把國內的這么多商場定期的更新指紋數據。
WiFi定位可以實現復雜的大范圍定位,但精度只能達到2米左右,無法做到精準定位。因此適用于對人或者車的定位導航,可以于醫療機構、主題公園、工廠、商場等各種需要定位導航的場合。
2.FRID定位
RFID定位的基本原理是,通過一組固定的閱讀器讀取目標RFID標簽的特征信息(如身份ID、接收信號強度等),同樣可以采用近鄰法、多邊定位法、接收信號強度等方法確定標簽所在位置。
這種技術作用距離短,一般最長為幾十米。但它可以在幾毫秒內得到厘米級定位精度的信息,且傳輸范圍很大,成本較低。同時由于其非接觸和非視距等優點,可望成為優選的室內定位技術。
目前,射頻識別研究的熱點和難點在于理論傳播模型的建立、用戶的安全隱私和國際標準化等問題。優點是標識的體積比較小,造價比較低,但是作用距離近,不具有通信能力,而且不便于整合到其他系統之中,無法做到精準定位,布設讀卡器和天線需要有大量的工程實踐經驗難度大。
3.紅外技術
紅外線是一種波長在無線電波和可見光波之間的電磁波。紅外定位主要有兩種具體實現方法,一種是將定位對象附上一個會發射紅外線的電子標簽,通過室內安放的多個紅外傳感器測量信號源的距離或角度,從而計算出對象所在的位置。
這種方法在空曠的室內容易實現較高精度,可實現對紅外輻射源的被動定位,但紅外很容易被障礙物遮擋,傳輸距離也不長,因此需要大量密集部署傳感器,造成較高的硬件和施工成本。此外紅外易受熱源、燈光等干擾,造成定位精度和準確度下降。
該技術目前主要用于[敏感詞]上對飛行器、坦克、導彈等紅外輻射源的被動定位,此外也用于室內自走機器人的位置定位。
另一種紅外定位的方法是紅外織網,即通過多對發射器和接收器織成的紅外線網覆蓋待測空間,直接對運動目標進行定位。
這種方式的優勢在于不需要定位對象攜帶任何終端或標簽,隱蔽性強,常用于安防領域。劣勢在于要實現精度較高的定位需要部署大量紅外接收和發射器,成本非常高,因此只有高等級的安防才會采用此技術。
4.超聲波技術
超聲波定位目前大多數采用反射式測距法。系統由一個主測距器和若干個電子標簽組成,主測距器可放置于移動機器人本體上,各個電子標簽放置于室內空間的固定位置。
定位過程如下:先由上位機發送同頻率的信號給各個電子標簽,電子標簽接收到后又反射傳輸給主測距器,從而可以確定各個電子標簽到主測距器之間的距離,并得到定位坐標。
目前,比較流行的基于超聲波室內定位的技術還有兩種:一種為將超聲波與射頻技術結合進行定位。由于射頻信號傳輸速率接近光速,遠高于射頻速率,那么可以利用射頻信號先激活電子標簽而后使其接收超聲波信號,利用時間差的方法測距。這種技術成本低,功耗小,精度高。另一種為多超聲波定位技術。該技術采用全局定位,可在移動機器人身上4個朝向安裝4個超聲波傳感器,將待定位空間分區,由超聲波傳感器測距形成坐標,總體把握數據,抗干擾性強,精度高,而且可以解決機器人迷路問題。
超聲波定位精度可達厘米級,精度比較高。缺陷是超聲波在傳輸過程中衰減明顯從而影響其定位有效范圍。
5.藍牙技術 (RSSI, AOA/AOD, HADM, WIRA)
藍牙定位基于RSSI(Received Signal Strength Indication,信號場強指示)定位原理。根據定位端的不同,藍牙定位方式分為網絡側定位和終端側定位。

網絡側定位系統由終端(手機等帶低功耗藍牙的終端)、藍牙beacon節點,藍牙網關,無線局域網及后端數據服務器構成。其具體定位過程是:
1)首先在區域內鋪設beacon和藍牙網關。
2)當終端進入beacon信號覆蓋范圍,終端就能感應到beacon的廣播信號,然后測算出在某beacon下的RSSI值通過藍牙網關經過wifi網絡傳送到后端數據服務器,通過服務器內置的定位算法測算出終端的位置。
終端側定位系統由終端設備(如嵌入SDK軟件包的手機)和beacon組成。其具體定位原理是:
1)首先在區域內鋪設藍牙信標
2)beacon不斷的向周圍廣播信號和數據包
3)當終端設備進入beacon信號覆蓋的范圍,測出其在不同基站下的RSSI值,然后再通過手機內置的定位算法測算出位置。
終端側定位一般用于室內定位導航,精準位置營銷等用戶終端;而網絡側定位主要用于人員跟蹤定位,資產定位及客流分析等情境之中。藍牙定位的優勢在于實現簡單,定位精度和藍牙信標的鋪設密度及發射功率有密切關系。并且非常省電,可通過深度睡眠、免連接、協議簡單等方式達到省電目的。
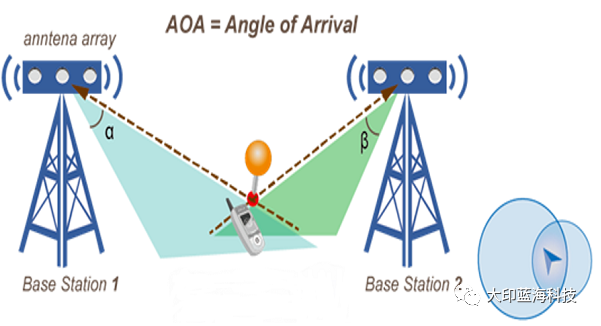
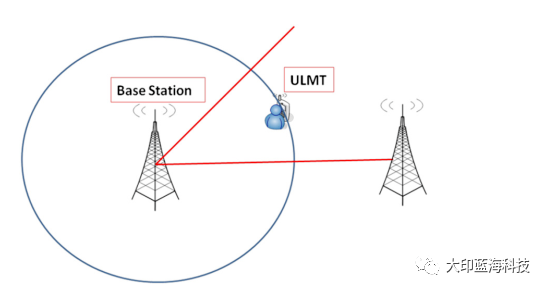
Angle of Arrival (AoA)
該技術計算信號從UD到ANs的角度,然后繪制UD可能存在的區域,如圖所示。基本上,這個區域是一條與ANs有一定角度的直線,雖然估計UD的位置至少需要兩個ANs,但如果AoA估計中出現一個小的誤差,位置估計誤差可能會很大。因此,基于AoA的技術對于定位效果有限,除非它與大型天線陣列一起使用。
6.慣性導航技術
這是一種純客戶端的技術,主要利用終端慣性傳感器采集的運動數據,如加速度傳感器、陀螺儀等測量物體的速度、方向、加速度等信息,基于航位推測法,經過各種運算得到物體的位置信息。
隨著行走時間增加,慣性導航定位的誤差也在不斷累積。需要外界更高精度的數據源對其進行校準。所以現在慣性導航一般和WiFi指紋結合在一起,每過一段時間通過WiFi請求室內位置,以此來對MEMS產生的誤差進行修正。該技術目前的商用得也比較成熟,在掃地機器人中得到廣泛應用。
7. LoRa中長距室內定位技術
LoRa Geolocation是面向低功率廣域網的無GPS解決方案。作為LoRa無線RF平臺的主要增強功能,Semtech的LoRa地理位置解決方案將能夠實現作為整體解決方案中一部分需要位置確定的應用。這種新功能由現有的LoRa終端節點支持,消除了額外的成本,并且不需要額外的處理能力,同時保持數據和位置的[敏感詞]安全性。LoRaWAN傳感器現在可以支持跟蹤應用,通過使用到達時間差技術來確定接近的位置。
比較而言,RFID的方向性可能導致漏讀或死角。LoRa成為了最合適的挑選:將主打公里級、低功耗傳輸技能的LoRa,與主打米級、低功耗傳輸技能的藍牙進行跨界混搭,立異性地找到了室內定位面臨的精度、功耗、成本、布置靈活性之間的平衡點!
8.超寬帶(UWB)定位技術
超寬帶技術是近年來新興一項全新的、與傳統通信技術有極大差異的通信無線新技術。它不需要使用傳統通信體制中的載波,而是通過發送和接收具有納秒或微秒級以下的極窄脈沖來傳輸數據,從而具有3.1~10.6GHz量級的帶寬。目前,包括美國,日本,加拿大等在內的國家都在研究這項技術,在無線室內定位領域具有良好的前景。
UWB技術是一種傳輸速率高,發射功率較低,穿透能力較強并且是基于極窄脈沖的無線技術,無載波。正是這些優點,使它在室內定位領域得到了較為精確的結果。
超寬帶(UWB)定位技術利用事先布置好的已知位置的錨節點和橋節點,與新加入的盲節點進行通訊,并利用三角定位或者“指紋”定位方式來確定位置。
超寬帶可用于室內精確定位,例如戰場士兵的位置發現、機器人運動跟蹤等。超寬帶系統與傳統的窄帶系統相比,具有穿透力強、功耗低、抗干擾效果好、安全性高、系統復雜度低、能提供精確定位精度等優點。因此,超寬帶技術可以應用于室內靜止或者移動物體以及人的定位跟蹤與導航,且能提供十分精確的定位精度。根據不同公司使用的技術手段或算法不同,精度可保持在0.1m—0.5m。
9.LED可見光技術
可見光是一個新興領域,通過對每個LED燈進行編碼,將ID調制在燈光上,燈會不斷發射自己的ID,通過利用手機的前置攝像頭來識別這些編碼。利用所獲取的識別信息在地圖數據庫中確定對應的位置信息,完成定位。
根據燈光到達的角度進一步細化定位的結果,高通公司做到了厘米級定位精度。由于不需要額外部署基礎設施,終端數量的擴大對性能沒有任何的影響,并且可以達到一個非常高的精度,該技術被高通公司所看好。
目前,可見光技術在北美有很多商場已經在部署。用戶下載應用后,到達商場里的某一個貨架,通過檢測貨架周圍的燈光即可知曉位置,商家在通過這樣的方法向消費者推動商品的折扣等信息。
10.地磁定位技術
地球可視為一個磁偶極,其中一極位在地理北極附近,另一極位在地理南極附近。地磁場包括基本磁場和變化磁場兩個部分。基本磁場是地磁場的主要部分,起源于地球內部,比較穩定,屬于靜磁場部分。變化磁場包括地磁場的各種短期變化,主要起源于地球內部,相對比較微弱。
現代建筑的鋼筋混凝土結構會在局部范圍內對地磁產生擾亂,指南針可能也會因此受到影響。原則上來說,非均勻的磁場環境會因其路徑不同產生不同的磁場觀測結果。而這種被稱為IndoorAtlas的定位技術,正是利用地磁在室內的這種變化進行室內導航,并且導航精度已經可以達到0.1米到2米。
不過使用這種技術進行導航的過程還是稍顯麻煩。你需要先將室內樓層平面圖上傳到IndoorAtlas提供的地圖云中,然后你需要使用其移動客戶端實地記錄目標地點不同方位的地磁場。記錄的地磁數據都會被客戶端上傳至云端,這樣其它人才能利用已記錄過的地磁進行精確室內導航。
11.視覺定位
視覺定位系統可以分為兩類,一類是通過移動的傳感器(如攝像頭)采集圖像確定該傳感器的位置,另一類是固定位置的傳感器確定圖像中待測目標的位置。根據參考點選擇不同又可以分為參考三維建筑模型、圖像、預部署目標、投影目標、參考其他傳感器和無參考。
參考3D建筑模型和圖像分別是以已有建筑結構數據庫和預先標定圖像進行比對。而為了提高魯棒性,參考預部署目標使用布置好的特定圖像標志(如二維碼)作為參考點;投影目標則是在參考預部署目標的基礎上在室內環境投影參考點。參考其他傳感器則可以融合其他傳感器數據以提高精度、覆蓋范圍或魯棒性。
除了以上提及的,目前來看定位技術的種類有幾十甚至上百種,而每種定位技術都有自己的優缺點和適合的應用場景,沒有[敏感詞]的勝負之分,從需求角度來說,室內定位可以通過不同技術來實現,對于位置基站、終端根據應用場景和要求來選擇適合的技術方案。主要看對精度、鋪設成本、終端類型尺寸及成本等方面的需求,根據不用的需求因地制宜的部署解決方案,方為上策。
免責聲明:本文轉載自“大印藍海科技”,本文僅代表作者個人觀點,不代表薩科微及行業觀點,只為轉載與分享,支持保護知識產權,轉載請注明原出處及作者,如有侵權請聯系我們刪除。
友情鏈接:站點地圖 薩科微官方微博 立創商城-薩科微專賣 金航標官網 金航標英文站
Copyright ?2015-2025 深圳薩科微半導體有限公司 版權所有 粵ICP備20017602號
